Product Description
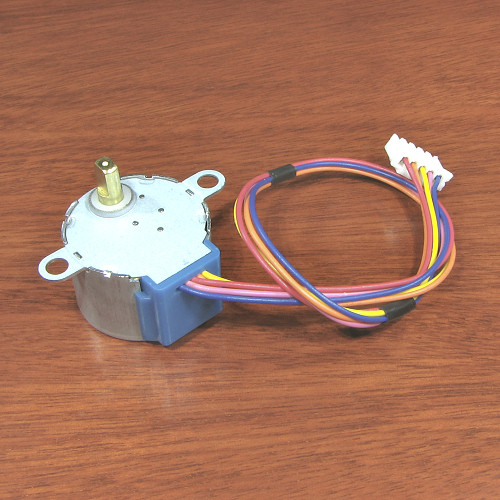
This widely used stepper motor is great value for money and is perfect for small robotic projects and simple experiments.
The motor is a simple unipolar design with a 32 steps per revolution motor in single-step mode and 64 steps/rev in half-step mode. With it’s internal 1:64 gearing, that equates to shaft accuracy of 2048 or 4096 steps/rev.
The stepper can be driven by energizing each winding in turn, although it is recommended that it is driven in a half-step mode, where one winding is powered down on each alternate step.
Recommended driver board is the ULN2003 Darlington driver module ULN2003 Darlington Module.
